
こんな先生・教授から学べます
低炭素社会の実現に貢献する自動車制御を追求する先生
自動車を運転していれば当たり前のように起きる混雑や渋滞。実は時間のロスだけでなく、燃費効率や二酸化炭素の排出量にも悪影響を及ぼしています。いつでもスムーズに走ることができれば、ドライバーにも地球にも優しい運転に繋がる。そんな課題に対して「制御」という技術を用いて取り組んでいます。無駄のない運転は燃費の効率化にも繋がり、二酸化炭素の排出量も抑えられます。一方で、信号機に合わせて自動運転をコントロールすることで、交差点の流れをスムーズにする技術開発に挑んでいます。自動車単体での制御と、自動車を複数台数の集合として道路を走る自動車全体を制御する、その両方をターゲットとして研究に取り組んでいます。

モニタリングを通してドライバーを自動車システムのモデルに組み込めれば、より高度な交通システムの制御も
より安全性が高く、環境にもやさしい交通システムを目指す
「制御」の技術開発ではモデル予測制御という方法を用いて、制御対象となる自動車の動きを運動方程式などの数式で表すモデル化。車は基本的にどう動くのか、前の自動車が近づいたらどうするのか、どうすれば止まり、どうすれば走り出すのか、といった挙動を数式で表現します。併せて計算機シミュレーター上で自動車が狙った通りの挙動を示して、制御の効果が示せるかをチェック。「自動車が狙った通りの挙動を示して、制御の効果が示せたときには大きな達成感がありますね」と向井教授は話します。
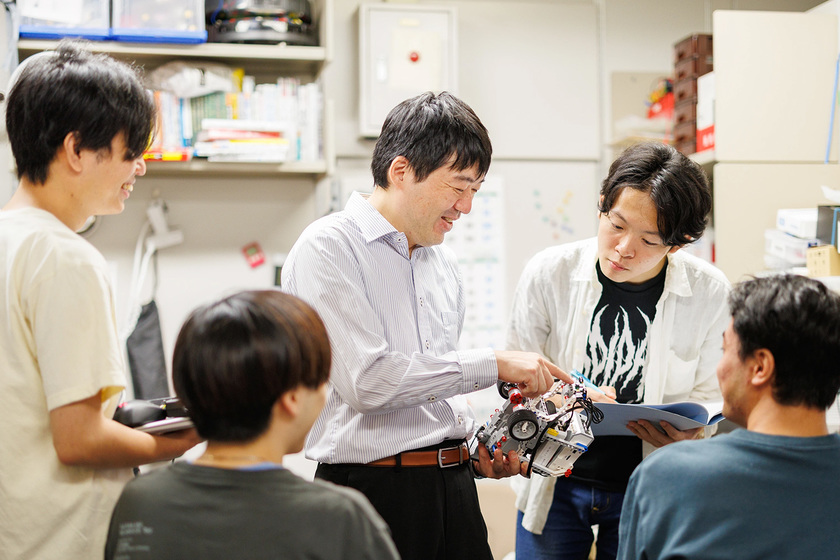
産学連携における研究にも積極的に取り組む向井教授。知識を培い、視野を広げる機会になるそう
交通、環境など社会のインフラを大きく変える可能性がある分野です
交通インフラの改善は、低炭素社会の実現に貢献できる研究です。新たな技術を開発し、その利便性を広く伝えていくことで、少しずつ社会の意識を変えられるかもしれない、やりがいのある分野だと考えています。

何度もチェックを繰り返す丁寧な作業の積み重ねが、この研究で求められるポイント
向井 正和 教授
大学時代、授業でコントローラーの設計を行い、自分の思い通りに物を動かせる面白さに惹かれて「制御」の分野へ。大学院博士課程を修了したのち、自動車会社研究所を経て大学の研究室にて勤務。交通システム制御のやりがいや社会貢献性の高さを知り、自らのテーマとして追求を続けている。
※この画面の情報は、すべて取材した時点でのものになります。

この学校のおすすめ記事
-
 在校生教授や学生、海外の研究者と共創しながら研究を進めています!工学部
在校生教授や学生、海外の研究者と共創しながら研究を進めています!工学部 -
 卒業後整備士の仕事を経て、現在は安全運航に不可欠な管理やマニュアル作成を担当しています工学部 国際基礎工学科卒業・機械工学専攻修了 技術部門員
卒業後整備士の仕事を経て、現在は安全運航に不可欠な管理やマニュアル作成を担当しています工学部 国際基礎工学科卒業・機械工学専攻修了 技術部門員 -
 卒業後生活に欠かせない「住宅」。社会貢献の必要性を意識しながら仕事と向き合っています建築学部 建築デザイン学科 建築士
卒業後生活に欠かせない「住宅」。社会貢献の必要性を意識しながら仕事と向き合っています建築学部 建築デザイン学科 建築士 -
 先生・教授「リン」をキーワードに環境問題に取り組む先生先進工学部 金 熙濬 特任教授
先生・教授「リン」をキーワードに環境問題に取り組む先生先進工学部 金 熙濬 特任教授